今天实验室分享了一篇2019年AAAI的论文:Spatiotemporal Multi-Graph Convolution Network for Ride-hailing Demand。讲的是通过时空多图卷积来进行打车需求的预测。
上学期实验室也分享论文,但是分享之后就忘了。所以决定从这学期开始,对一些我觉得对我有帮助的论文记录下来
这篇论文和以前读到的图卷积的论文的不同是:这篇论文构建了多个图。
在介绍这篇论文之前,先写出自己以前一直没有弄清楚的一个点。一个图有2个矩阵,一个是邻接矩阵A,一个是图信号矩阵X。邻接矩阵A表示的是这个图的结构,节点与节点之间的连接关系。图信号矩阵表示这个图中每个节点的特征。假设一个图有100个节点,每个节点有3个特征,那么邻接矩阵A的维度是100x100,图信号矩阵X的维度是100x3。在构造下面的3个不同的图时,只是邻接矩阵A不同,图信号矩阵都是一样的。在计算图卷积的时候会同时用到图的邻接矩阵和图信号矩阵。
1. 任务
这篇论文的任务就是一个区域$T$个时间段的特征(可能有1个特征即打车订单数,也可有多个特征)预测第$T+1$时刻的特征值。
2. 数据处理
首先这篇论文将一个城市进行网格划分,一个网格表示一个区域region。然后对这些网格构建图。多图就体现在构建图上,原先的论文是构建一个图,这篇论文构建了3个图。论文的任务是打车需求量预测。论文中说一个region的打车需求可能和以下3个方面有关系:邻近区域neighborhood,和该区域功能相近的区域,和该区域道路可达的区域。所以论文根据以上3种关系分别构建了3个图。
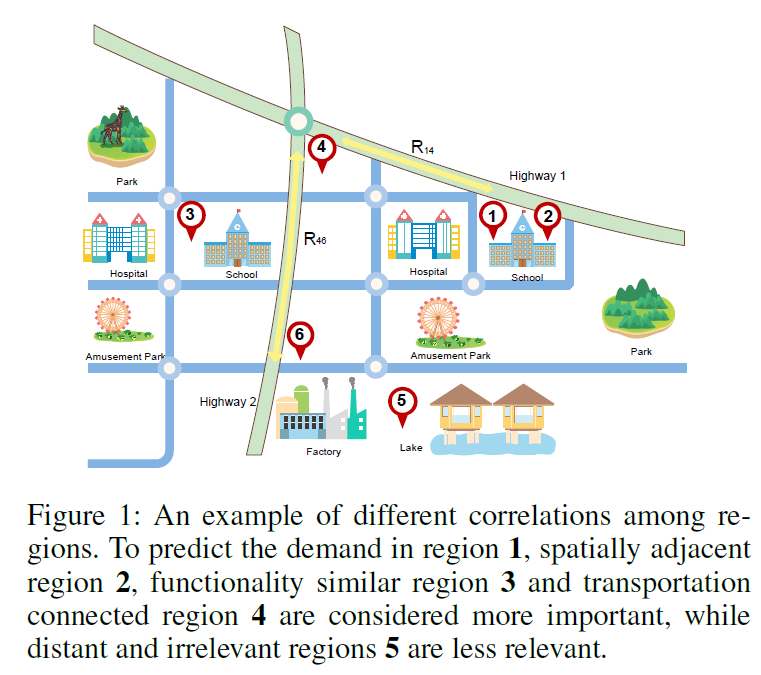
例如上图所示,和region1相邻的区域是region2,和region1功能相似的是region3,和region1交通可达的是region4。
2.1. Neighborhood
构建的邻居图用$\mathcal{G}_N=(V,A_N)$表示,其中V表示所有的区域,$A_N$表示区域与区域之间的邻居关系。构建的图一个节点表示一个region,2个区域有边表示这2个区域是邻居,没有边相连表示不是邻居。这样就可以从原始的图中根据邻近关系构建出一张图
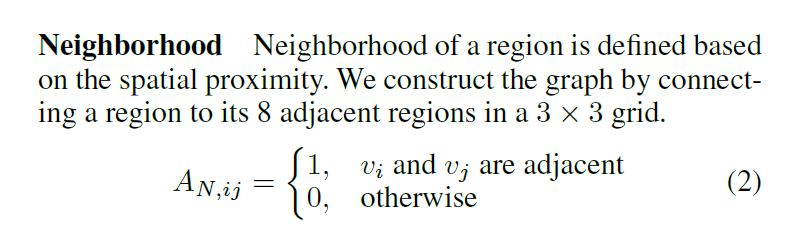
怎么判断两个区域是否相邻?首先把一个city划分成grid,一个区域周围的8个区域就是这个区域相邻,那么$A_{N,ij}=1$,否则为0。这样就构建了一个大小为$\mathbb{R}^{|V|\times|V|}$的矩阵$A$。
2.2. Functional similarity
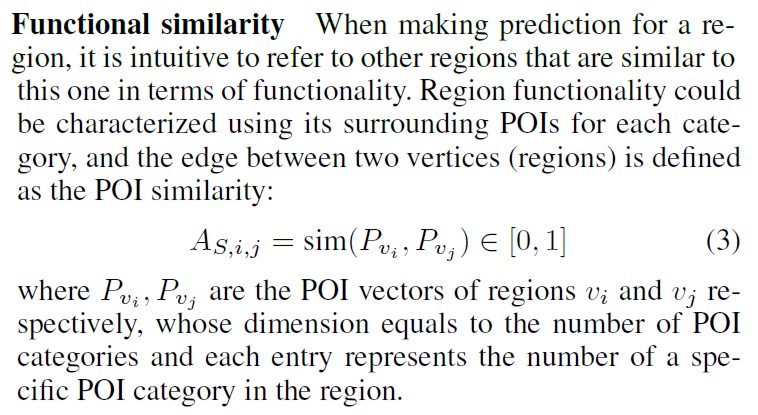
构建的功能相似图用$\mathcal{G}_N=(V,A_S)$表示,其中V表示所有的区域,$A_S$表示区域与区域之间的功能相似关系。构建的图一个节点表示一个region,2个区域有边表示这2个区域之间的相似关系,是一个[0,1]之间的数。计算两个区域之间的相似关系:首先需要知道每个区域的POI向量。POI向量是这个区域在某个类别的POI的个数,例如POI有5类,分别是:学校、公园、医院、商场、居民区,这种区域有1个学校,2个公园、0个医院、3个商场、1个居民区,则POI向量为[1,2,0,3,1],计算两个region的功能相似性即计算两个POI向量的相似性。
2.3. Transportation connectivity
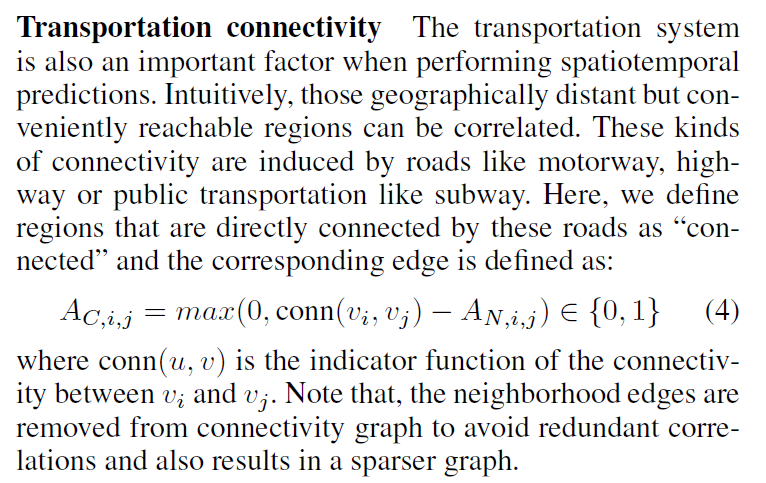
构建的交通可达图用$\mathcal{G}_N=(V,A_C)$表示,其中V表示所有的区域,$A_C$表示区域与区域之间的可达关系。构建的图一个节点表示一个region,2个区域可达判断的依据是通过OpenStreetMap,看两个区域之间是否有highway,subway,motorway,如果有的话就表示这两个区域交通可达。如果两个
region交通可达,则conn($v_i,v_j$)=1,否则为0。然后需要注意的是这里减去了邻居关系。因为考虑了交通可达,不想再次考虑邻居关系。取max为了保证没有负值。
3. ST-MGCN模型
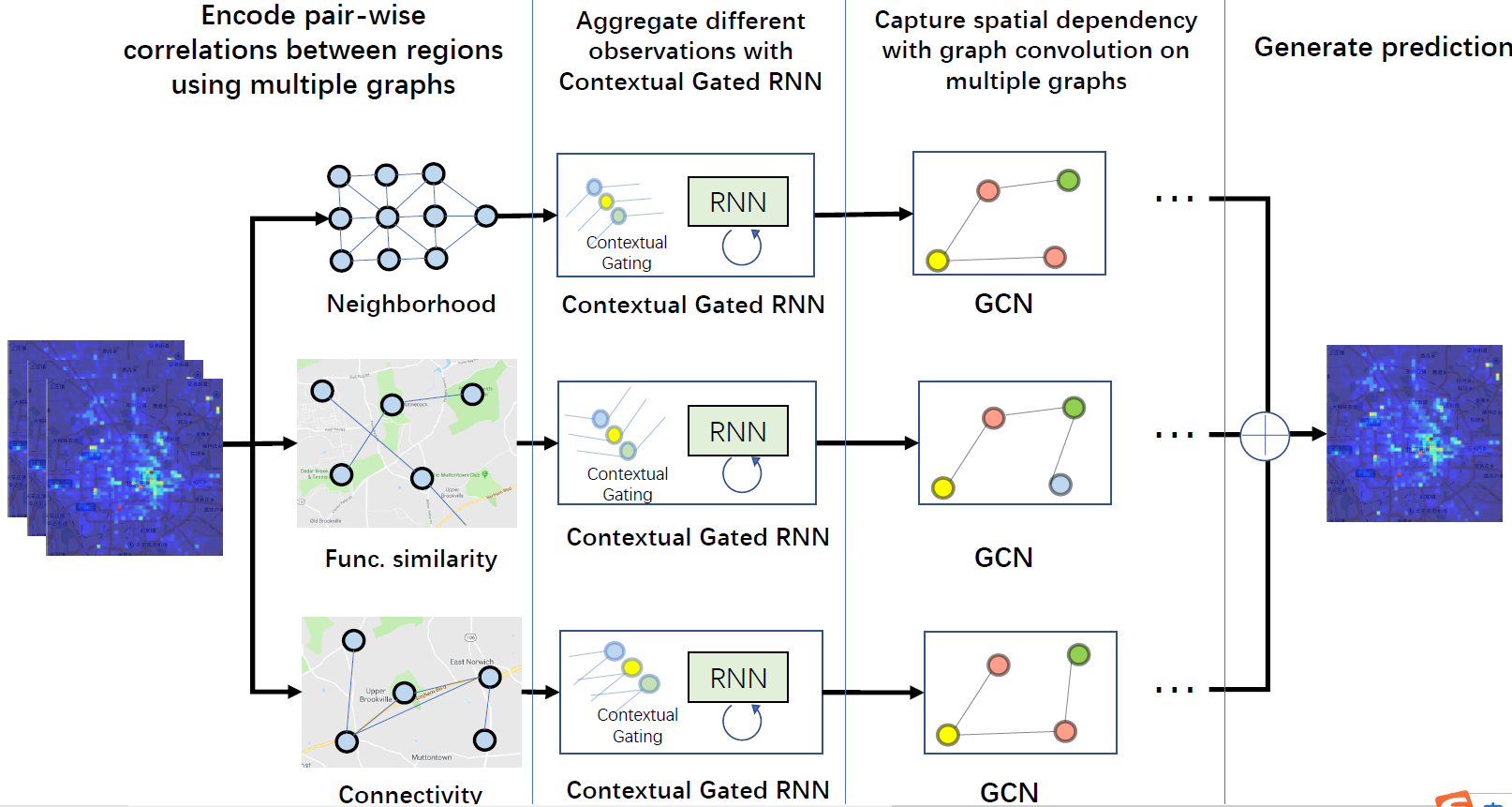
这篇论文提出的模型是$spatiotemporal \quad multi-graph \quad convolution \quad network\quad(ST-MGCN)$。首先输入是原始数据,一个城市所有区域的特征,不同的层表示不同的时间,那么输入$X\in\mathbb{R}^{T\times|V|\times{P}}$,每一个时刻有一个图信号矩阵,维度为$|V|\times{P}$,一共有$T$个时刻。然后从原始数据中提取出3张图,分别表示region之间的邻居图、功能相似图、交通可达图。这三张图的维度也是$\mathbb{R}^{T\times|V|\times{P}}$,只是这3张图的邻接矩阵不同。然后经过$contextual \quad gated \quad recurrent \quad neural\quad nwtwork\quad (CGRNN)$对时间进行建模,然后分别输出一张图,一共输出3张图。然后再用multi-graph convolution对空间进行建模,最终输出一张图,表示下一时刻各个节点的特征
3.1. Temporal correlation modeling
提出$Contextual \quad Gated \quad Recurrent \quad Neural \quad Network \quad (CGRNN)$来对不同时刻的图信号进行建模。在一个城市的打车需求,在某一个时刻,可以记录每个节点(region)的特征,因为是时间序列数据,就有了时间的维度,这样就可以形成T个图信号。CGRNN在对时间建模时引入了上下文信息contextual information。其中contextual information指的是邻近区域的信息,通过图卷积GCN来获取。模型框架图如下所示:
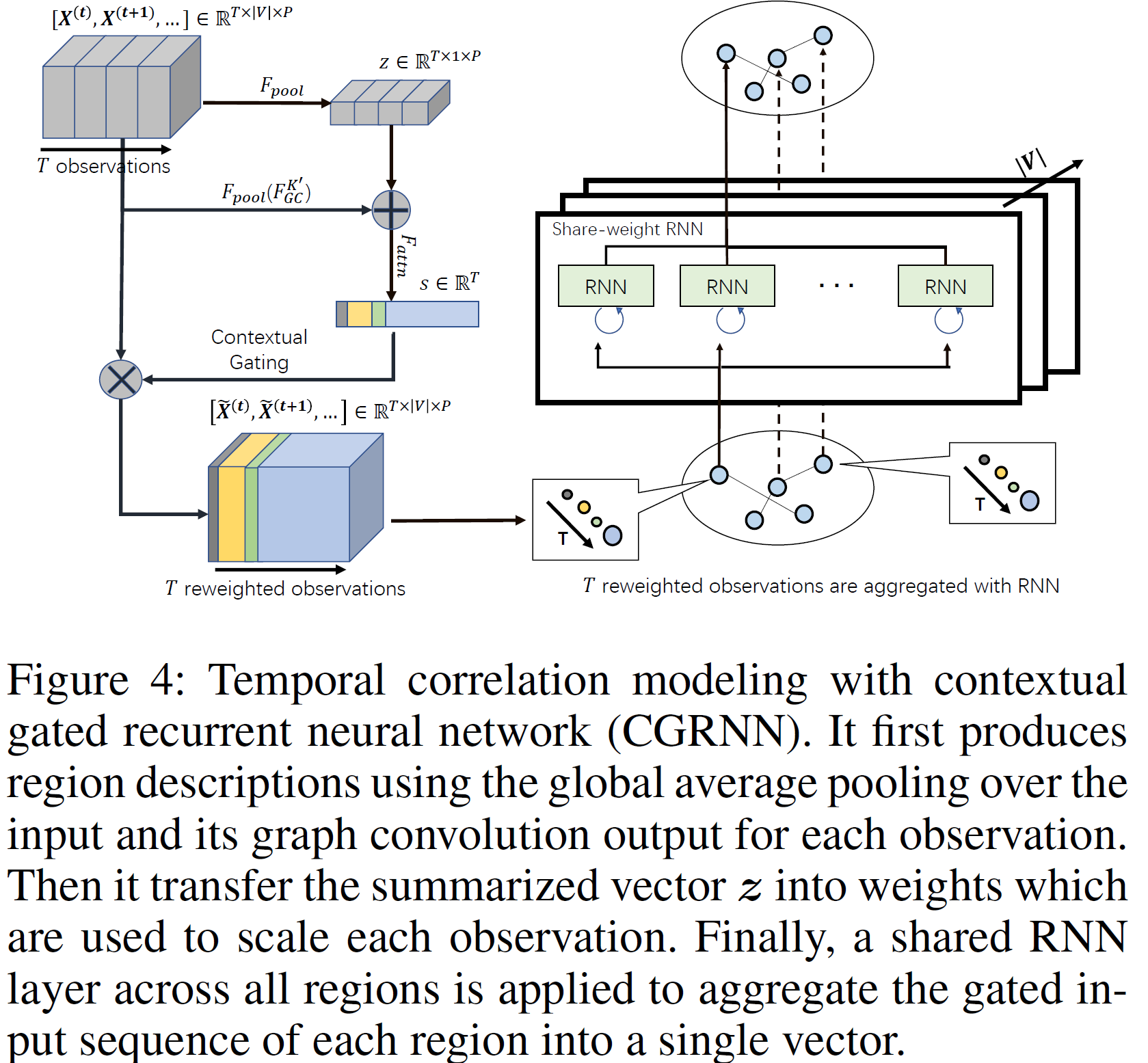
有T个时刻,第$t$个时刻的观察值是$X^{(t)}\in\mathbb{R}^{|V|\times{P}}$,其中$P$表示每个节点的特征维度,如果$P=1$表示只有一个特征,仅包含region的打车订单数。
按照上面的模型图,执行的顺序是:
(1)先把原始的图$[X^{(t)},X^{(t+1)},…]\in\mathbb{R}^{T\times|V|\times{P}}$经过一个池化层,把一个特征在所有区域的特征值取平均,这样就变成维度为$\mathbb{R}^{T\times1\times{P}}$,与此同时对原始的图信号$[X^{(t)},X^{(t+1)},…]\in\mathbb{R}^{T\times|V|\times{P}}$中的每个时刻的图信号$\mathbb{R}^{|V|\times{P}}$进行卷积操作,K=K‘,表示得到一个结合K`阶邻居信息图$\mathbb{R}^{|V|\times{P}}$,T个时刻共得到T个$\mathbb{R}^{|V|\times{P}}$,即$\mathbb{R}^{T\times|V|\times{P}}$,再经过一个池化操作,得到一个$\mathbb{R}^{T\times1\times{P}}$,然后把2个$\mathbb{R}^{T\times1\times{P}}$进行拼接concatenate,得到一个$\mathbb{R}^{T\times1\times{2P}}$,每个region的特征维度变成2P,前一个P表示的是自己的特征,后一个P表示的整合邻居后的特征。
上述的操作在论文中的式子如下:
论文中的式子是先拼接成$\mathbb{R}^{T\times|V|\times{2P}}$,然后再池化成$\mathbb{R}^{T\times1\times{2P}}$,但是模型图上是先分别池化成$\mathbb{R}^{T\times1\times{P}}$,再拼接成$\mathbb{R}^{T\times1\times{2P}}$
(2)然后经过2个全连接层,得到关于时间的attention,s的维度是$s\in\mathbb{R}^T$
(3)将s和原始图信号进行内积,得到缩放后的图信号,维度为$\mathbb{R}^{T\times|V|\times{P}}$。
(4)最后经过一个共享的RNN神经网络。对于每一个节点,在每一个时刻会有一个P个特征值,经过T个时刻,会形成一个$\mathbb{R}^{T\times{P}}$的矩阵,一共有V个节点,对每一个节点的时间序列都应用这个RNN,最后每个节点都会输出一个隐藏变量$H_i$,V个节点会形成V个隐藏变量,最终会输出一个$\mathbb{R}^{|V|\times{P}}$的矩阵。
一共有三个图,所以经过CGRNN会输出3个$\mathbb{R}^{|V|\times{P}}$的矩阵,这时的邻接矩阵还是输入图的A。
3.2. Multi-Graph Convolution
对时间建模完成之后,接下来使用Multi-graph Convolution对空间进行建模。
其中$\bigsqcup$是聚合函数,可以是sum,avg,max等,其中$f(A;\theta_i)$是ChebNet卷积核,是$\sum_{k=0}^K\theta_kL^k$,卷积运算可以写成$g_{\theta}*x=(\sum_{k=0}^K\theta_kL^k)x$,其中$L_{ij}^k=0$表示节点$i$到节点$j$可以在k跳到达,$k$定义了图卷积的感受野。以road connectivity为例,$\mathcal{G}_C=(V,A_C)$中,拉普拉斯矩阵L由邻接矩阵A计算得到,在道路连通图中的邻接矩阵$A_{C,1,4}=1;A_{C,1,6}=0;A_{C,4,6}=1$表示region1和4道路连通,region1和6道路不连通,region4和6道路连通。拉普拉斯矩阵L中,对角线表示这个节点的度,其余值不为0表示这个节点的一阶邻居,道路连通图的拉普拉斯矩阵$L_{C,1,4}^1\ne0;L_{C,1,6}^1=0;L_{C,4,6}^1\ne0$。如果在ChebNet中K=1,则对于region1这个节点来说,经过一次卷积运算后,下一层的输出region1这个节点新的特征中只包含了region1的一阶邻居的信息,不包含region6的信息,因为$L_{C,1,4}^1\ne0;L_{C,1,6}^1=0$,如果ChebNet中的K=2,则region1经过一次图卷积运算,下一层region1的特征包含一阶邻居region4和二阶邻居region6的信息,因为$L_{C,1,4}^2\ne0;L_{C,1,6}^2\ne0$。
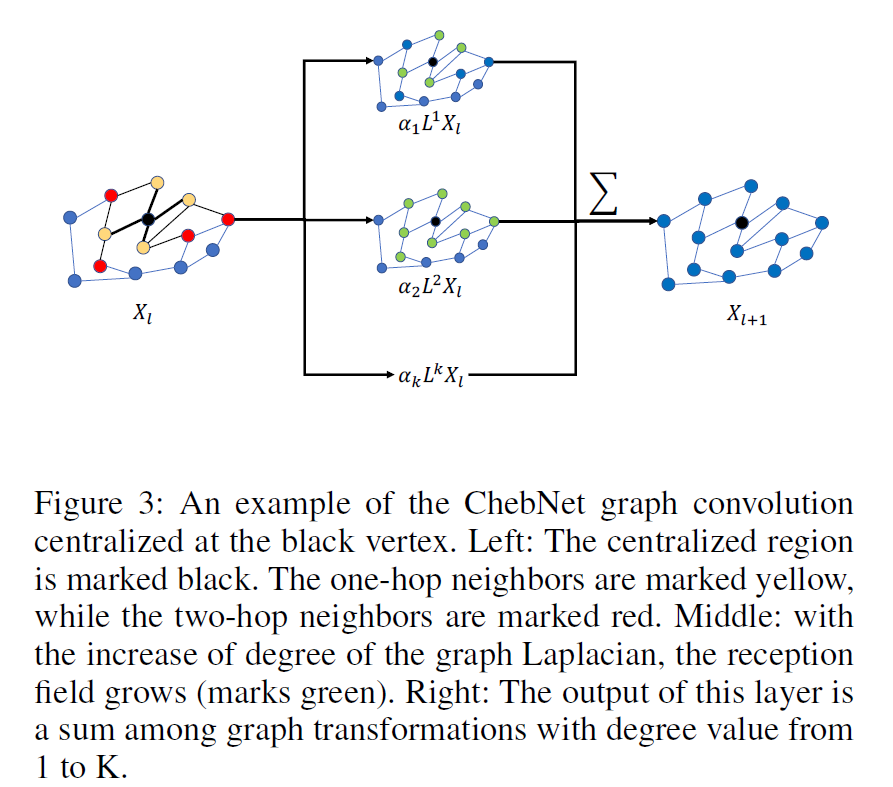
这个图中,假设ChebNet的$K=k$,根据卷积的运算公式$g_{\theta}*x=(\sum_{k=0}^K\theta_kL^k)x$,对于上图中,把黑色的点当做中心结点,黄色的点是一阶邻居,红色的点是二阶邻居。蓝色的点是三阶邻居。首先计算$k=1$时,则对于黑色的中心结点,整合了一阶邻居的信息得到一个图信息矩阵。然后计算$k=2$时,则对于黑色的中心结点,结合一阶邻居和二阶邻居的信息得到一个新的图信号矩阵,一直到$K=k$,得到了$k$个图信号矩阵,然后把这$k$个图信号矩阵相加得到下一层黑色的中心结点的表示。如果对$X_l$中的每个节点都执行这样的操作,则经过图卷积,下一层的输出$X_{l+1}$则表示每个节点整合了邻居信息得到的一个新的图信号矩阵
这样每一个图经过一个图卷积得到一个新的图信号矩阵,3个图得到3个新的图信号矩阵,然后再执行$\bigsqcup$聚合操作,在这篇论文中,$\bigsqcup$选择的是sum操作,就是说得到的3个新的图信号矩阵,直接相加就得到一个图,表示最终的预测结果。

