这篇综述性论文介绍图神经网络在交通领域的应用。
1. 摘要
在交通数据中,有很多数据以图的形式存在,为了充分利用其中的空间信息,很多模型使用图神经网络来处理交通图数据。本文针对交通领域的图网络模型进行总结。
2. 前言
在交通预测领域,(1)早期采用的方法有:ARIMA,VAR,Kalman过滤器等,然而,这些方法通常需要一些前提假设,例如数据是静态且线性相关,不能应用在实际数据中。(2)机器学习方法例如SVM,K近邻可以建模交通数据中的非线性相关性,但是模型结构较浅,且需要人工构造和选择特征,不能满足大量交通数据的应用需求。(3)深度学习方法,例如RNN无法捕获空间相关性,CNN无法应用在图数据中,并且CNN更关注local相关性,忽略了global相关性。(4)图神经网络,使用图神经网络来解决交通领域的预测问题。
贡献总结如下:
- 第一篇介绍图神经网络在交通领域应用的综述
- 系统地列出交通领域的研究方向和挑战
- 针对4种交通领域数据,介绍如何构建图
- 分析了5种应用在图交通领域的技术,介绍了它们的优缺点,以及变体
- 讨论了基于图网络的交通任务中4种常见的挑战,并总结对应的解决方案
- 收集数据集,开源代码
3. 研究方向
给出了交通领域的一些研究问题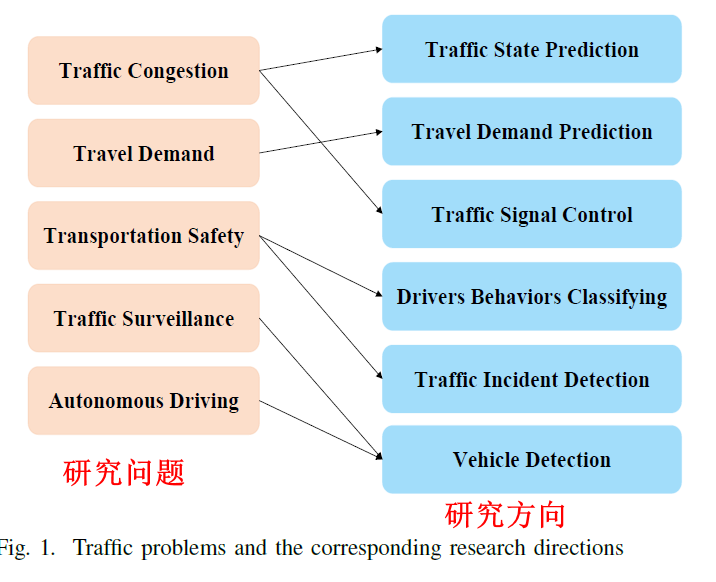
- 交通拥堵
- 交通需求
出租车、自行车、公共交通的需求预测,像滴滴,Uber等线上打车平台经常做这一类问题。 - 交通安全
预测交通事故的风险,严重程度 - 交通监控
主要通过监控的图像和视频检测车辆,行人检测。 - 自动驾驶
自动驾驶要求检测树木,道路,行人,一般和CV领域相关。
图神经网络在交通领域的应用
- 交通状态预测
交通状态:交通流量、速度、时间ETA、密度等。 - 交通需求预测
预测将来用户对出租车、自行车的需求 - 交通信号预测
减低用户在交叉路口的等待时间,避免交通拥堵 - 司机行为分类
交通事故预测还没有用到图模型。
4. 问题定义
基于图的交通预测问题,首先需要构件图G。
- 图:无权图,有权图,无向图,有向图,取决于具体的任务。
- 节点:传感器sensor,路段,道路交叉口,GPS交叉点。
- 邻接矩阵A:非0即1,浮点数(表示2个节点的关系,例如相似性,距离)
给定历史P个时间段所有节点的信息,维度是$\left[\mathcal{X}_{1}, \cdots, \mathcal{X}_{i}, \cdots, \mathcal{X}_{\mathbf{P}}\right] \in \mathbb{R}^{\mathbf{P} \times \mathbf{N} \times \mathbf{F}_{1}}$预测未来Q个时间段的$\mathcal{Y}=\left[\mathcal{Y}_{1}, \cdots, \mathcal{Y}_{j}, \cdots, \mathcal{Y}_{\mathrm{Q}}\right] \in \mathbb{R}^{\mathbf{Q} \times \mathbf{N} \times \mathrm{F}_{\mathrm{O}}}$
- 预测的特征只有1个,即$F_O=1$,预测特征有多个,即$F_O>1$
- 预测未来时间段只有1个,单步预测,即$Q=1$,预测未来时间段有多个,多步预测,即$Q>1$
- 多步预测问题中,一般使用FC(将输出reshape成需要的维度,ASTGCN,T-GCN,),Seq2Seq(使用RNN循环输出预测结果,DCRNN,GMAN),空洞技术(WaveNet)
4.1. 构建图
在构建图时,一般使用3类数据:传感器,GPS轨迹,打车订单数据,
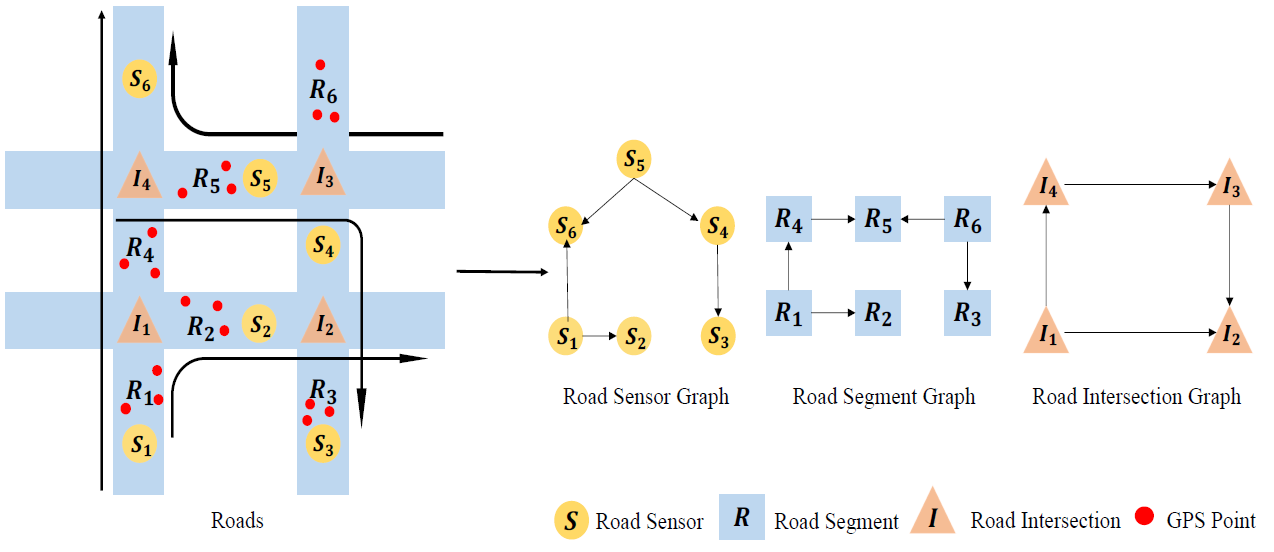
- 传感器数据
最常用的加州PEMS数据,图中的每个节点表示一个传感器,同一条路上的传感器有边相连。 - GPS数据
GPS轨迹数据,需要将GPS匹配到最近的路段上,以路段为节点创建图,或者以交叉路口为节点创建图。这里的图可以是有向,也可以无向。
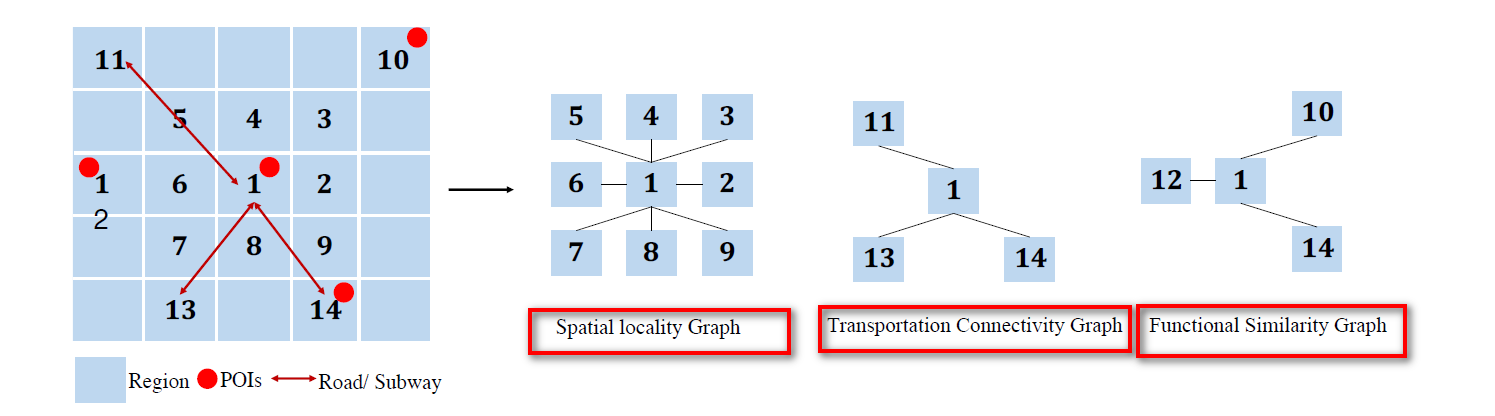
- 订单数据
将城市划分为网格,每个节点表示一个网格,边表示连通性。可以根据不同的特征来构件图,例如下图使用邻近区域、道路连通性、功能相似区域分别构建3个图。
- 公共交通数据
- 地铁图:每个地铁站表示一个节点,如果一条线上的2个地铁站相邻则有边。图信号矩阵是inflow和outflow
- 公交车图:每个公交站是一个节点,如果一条线上的2个公交站相邻则有边。图信号矩阵进站记录
4.2. 构造邻接矩阵
- 静态邻接矩阵
邻接矩阵不会随着时间变化。可以根据节点之间的特征构建多个邻接矩阵,例如功能相似,道路相通,时间相似。邻接矩阵中的值可以是非0即1,也可以表示节点间距离或者相似性。一般通过阈值来定义邻接矩阵,通过调整阈值来控制邻接矩阵的稀疏性。
- 动态邻接矩阵
有2种情况:1. 邻接矩阵不随着时间变化,但是邻接矩阵不是预先定义好的,而是模型先动态学习节点嵌入,然后根据学习到的节点嵌入构造邻接矩阵。2. 邻接矩阵随着时间变化。
5. 前人的模型
分析图神经网络在交通领域的应用,发现GNN通常和其他组件一起用,类似RNN,Seq2Seq,TCN等。
5.1. GNN
GNN在交通领域的应用主要有3个:谱图卷积for无向图,扩散卷积for有向图。
谱图卷积
谱图卷积要求对称的拉普拉斯矩阵,来实现特征值分解。
扩散卷积
谱图卷积要求对称的拉普拉斯矩阵,来实现特征值分解。但是对于有向图来说,拉普拉斯矩阵不是对称的。扩散卷积对图的结构,邻接矩阵,拉普拉斯矩阵没有任何限制。扩散卷积可以看做是转移矩阵的幂次,表示从节点i到节点j的转移概率。
总结:谱图卷积和扩散卷积的不同:谱图卷积的邻接矩阵揭示中心节点和它直接邻近的节点更相关。而扩散卷积揭示空间依赖是随机且动态的。扩散卷积比谱图卷积更复杂。扩散卷积可以适用在任何交通网络上,而谱图卷积只能用在对称的图上,即无向图中。
有些工作在使用SGC和DGC使用以下tricks
- 使用SGC时,引入attention机制
S表示图信号矩阵,使用切比雪夫多项式计算图卷积时,对S求attention,计算节点之间的影响程度。
直接使用邻接矩阵,FFR表示道路特征
在邻接矩阵中引入地理位置信息
5.2. RNN
交通任务预测中很多都是时间序列数据,适用RNN来捕获时间相关性。这里包括三类:RNN,LSTM,GRU
- RNN:输入层,隐藏层,输出层
- LSTM:为了解决RNN的梯度消失和梯度爆炸问题,引入输入门,遗忘门,输出门。
- GRU:LSTM结构复杂,参数更多,用更简单的GRU来代替,只有2个门:重置门
在交通预测领域中,很少用RNN,大部分都是用GRU,少数用LSTM。在用GRU或LSTM时,有很多小tricks,例如attention,门控机制,残差机制。
在使用RNN所用到的tricks
- 在RNN中引入空间信息
- 引入外部因素
- 使用空洞RNN
- RNN和图卷积结合
5.3. TCN
虽然RNN可以捕获时间的相关性,但是其不能并行计算,耗时。与之对比,1D卷积运行更快,同样也可以捕获时间相关性。然后1D卷积与RNN相比应用更少,由于1D卷积缺少长期建模的memory机制。后来提出空洞卷积,在长期时间建模上,比RNN效果更好。之后,TCN被广泛应用在时间建模上。
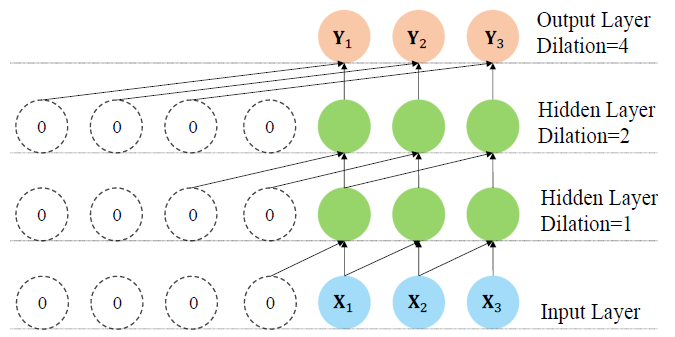
在使用TCN时,有一些小traick
堆叠不同的TCN层,每层使用不同的dilation rate
残差,原始输入+TCN的输出
使用门控机制
5.4. Seq2Seq
原始的Seq2Seq模型为对输入进行建模,得到一个隐变量$C$,然后将$C$输入到解码器中,进行预测。
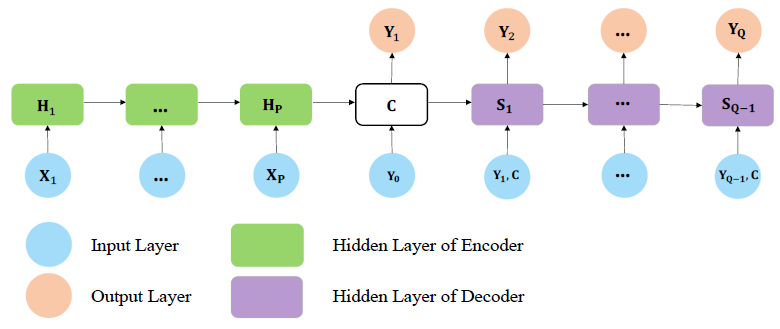
对Seq2Seq的改进主要有2点:
改变隐变量C
原先输入到decoder的C是固定的,对decoder中所有的时间步来说都一样,然后输入中的值对不同的输出影响程度不同,这里引入attention机制,动态改变C采样
在decoder在训练阶段和测试阶段的输入是不同的。在训练阶段,decoder的不同时间步输入的真实的label,而在测试阶段,因为不知道label,输入的是上一个时间步预测的结果,这样可能会造成错误累积的问题。为了解决这个问题,可以在训练阶段进行采样,即并不总是输入真实的label,以$\epsilon_{j}$输入真实babel,以$1-\epsilon_{j}$输入上个时间步的预测结果。
交通领域中的多步预测通常采用Seq2Seq架构。Seq2Seq中的encoder和decoder架构通常采用RNN,但是也不一定相同。
5.5. GAN
这一模块看的论文较少,以后补充
6. 挑战
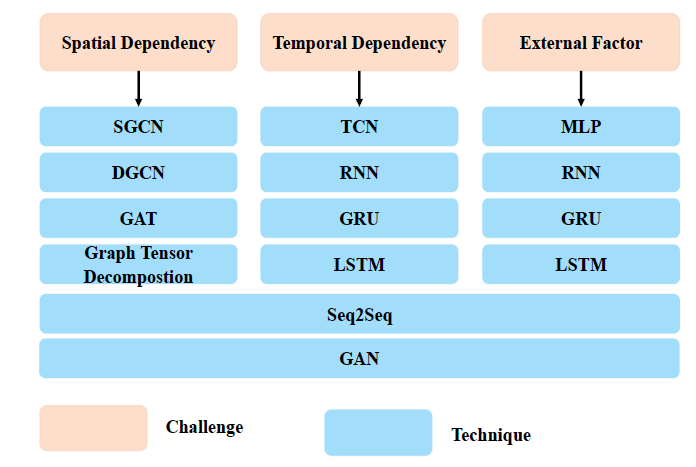
尽管交通领域有很多研究方向,但它们都有一些共同的挑战,如下所示,主要分为三类:空间依赖,时间依赖,外部因素。
6.1. 空间依赖
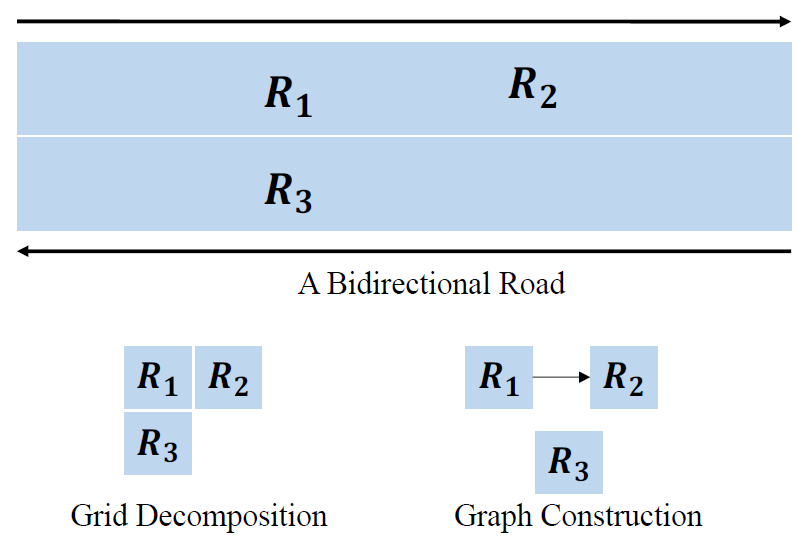
在一个双向的道路中,R1只受R2的影响,R3对R1的影响较小。如果采用网格的形式,R3和R2对R1的影响相同,这不符合实际。如果采用图的形式,R2对R1的影响较大,R3对R1的影响较小,符合实际。
交通网络中空间依赖十分复杂,可以分成三类:空间局部性,多元关系,全局连通性。
- 空间局部性
空间局部性表示邻近区域比较远的区域更相关。K阶局部谱图卷积SGCN可以聚合0~K-1跳的邻居信息。还有一些其他工作可以捕获空间局部相关性。比如动态计算邻接矩阵 - 多元关系
目标区域也可能与距离较远的区域相关。例如功能相似的区域,交通连通的区域。根据这些不同的相似性来创建不同的图。 - 全局连通性
以上2点更关注网络部分,而忽略了整体的结构。全局连通性表示不同区域的交通情况在整个网络上互相影响。使用扩散卷积、pooling层、self-adaptive邻接矩阵可以捕获到这种全局连通性。
6.2. 时间依赖
使用RNN或TCN来捕获时间依赖
- 多粒度
时间有不同的周期性,例如recent,daily,weekly。 - 不同的权重
历史信息对目标时间段的影响权重不同。使用Attention机制计算权重分数。
6.3. 时空依赖
以上对时间和空间依赖分别建模,如果对时空依赖同时建模,预测效果可能会更好。例如STSGCN
6.4. 外部因素
天气(雨/温度/空气质量),时间(节假日/周几/几点),特殊时间,POI等信息都会影响交通预测。
对于外部因素的处理通常有2种方法:
- 和其他因素拼接,输入到模型中
- 设计外部因素处理模块,对外部因素单独处理。通常是2个FCN,第一个FCN提取重要信息,第二个FCN从低维特征映射到高维特征
7. 未来方向
- 在司机行为分类,车辆/人们轨迹预测,交通事故预测使用图模型。
- 大多使用SGCN和DGCN,很少使用GAT,GAE,RNN+GCN,可以使用以上模型解决交通问题
- 交通问题大多是回归问题,很少有分类问题,可以使用图模型研究分类问题
- 现有模型对外部因素处理比较简单,可以设计更复杂的模型捕获外部因素信息。

